a) s2 + 5s + 2
b) s3 + 4s2 + 6s + 6
c) s3 + 2s2 - 4s + 20
d) s4 + s3 + 2s2 + 10s + 8
e) s4 + s3 + 3s2 + 2s + K
f) s5 + s4 + 2s3 + s + 5
g) s5 + s4 + 2s3 + s2 + s + K
Para todos los casos determine el número de raíces, si las hay. Indique si alguna cae en la parte derecha del plano.
Determine el intervalo de K que dé como resultado un sistema estable."
Del libro "Sistemas de Contro Moderno" , 10ma edición, Richard Dorf
Introducción
Un problema importante en los sistemas de control es la estabilidad, una forma sencilla de determinar la estabilidad de un sistema es utilizar el criterio de Routh-Hurwitz.
El criterio de Routh-Hurwitz es un método numérico que nos permite determinar el número de polos inestables en un sistema. Dicho método hace uso del polinomio que se encuentra en el denominador de la función de transferencia con la forma, el denominador recibe el nombre de ecuación caracteristica:
$$
\frac{C(s)}{R(s)} = \frac{b_{0}s^{m} + b_{1}s^{m-1} + b_{2}s^{m-2} + ... + b_{m}s^{0}}{a_{0}s^{n} + a_{1}s^{n-1} + a_{2}s^{n-2} + ... + a_{n}s^{0}}
$$
Como mencione en el párrafo anterior, tomando la ecuación caracteristica
$$ F(s) = a_{0}s^{n} + a_{1}s^{n-1} + a_{2}s^{n-2} + ... + a_{n}s^{0} $$
... se debe crear una tabla acomodando los elementos de la siguiente forma.
$$ \left.\begin{matrix} s^{n}\\ s^{n-1}\\ s^{n-2}\\ ...\\ ...\\ ...\\ s^{0} \end{matrix}\right| \left.\begin{matrix} a_{0} & a_{2} & a_{4} & a_{6} & ... & ...\\ a_{1} & a_{3} & a_{5} & a_{7} & ... & ...\\ b_{1} & b_{2} & b_{4} & ... & ... & ...\\ c_{1} & c_{2} & ... & ... & ... & ... \\ ... & ... & ... & ... & ... & ... \\ ... & ... & ... & ... & ... & ... \\ g_{1} & g_{2} & g_{3} & ... & ... & ... \\ \end{matrix}\right| $$
Las primeras 2 filas contienen los coeficientes de las variables la ecuación caracteristica, de la tercera fila en adelante los valores se encuentran según las siguientes formulas:
| $$ b_{1} = \frac{a_{1}a_{2} - a_{0}a_{3}}{a_{1}} $$ $$ b_{2} = \frac{a_{1}a_{4} - a_{0}a_{5}}{a_{1}} $$ $$ b_{3} = \frac{a_{1}a_{6} - a_{0}a_{7}}{a_{1}} $$ | $$ c_{1} = \frac{b_{1}a_{3} - a_{1}b_{2}}{b_{1}} $$ $$ c_{2} = \frac{b_{1}a_{5} - a_{1}b_{3}}{b_{1}} $$ |
Como podemos ver, el método es bastante parecido a los métodos de solución de matrices, tomando un pivote y multiplicando los valores en cruz para posteriormente restarlos y dividirlos entre el pivote.
Una vez que se da solución a la tabla, el número de raíces en la ecuación característica con parte real positiva es igual al número de cambios de signo en los coeficientes de la primera columna. Éste número también indica el número de polos que se encuentran en el semiplano derecho del plano s; cabe mencionar que un sistema de control es estable si y solo si todos los polos en lazo cerrado se encuentran en el semiplano izquierdo del plano s.
Soluciones
a) s2 + 5s + 2
La solución a éste sistema es bastante sencilla, la tabla nos queda resuelta asi:
$$ \left.\begin{matrix}
s^{2}\\
s^{1}\\
s^{0}\\
\end{matrix}\right|
\left.\begin{matrix}
1 & 2 \\
5 & ... &\\
2 & ... &\\
\end{matrix}\right| $$
La solución podemos comprobarla de 2 formas con octave, utilizando el comando roots y gráficando los polos con el comando rlocus, éste es el resultado:

Las raíces se encuentan en los puntos (-4.56155, 0) y (-0.43845, 0), como las raíces son negativas, el sistema es estable.
b) s3 + 4s2 + 6s + 6
Para éste sistema la tabla queda resuelta de la siguiente forma:
$$\left.\begin{matrix}
s^{3}\\
s^{2}\\
s^{1}\\
s^{0}\\
\end{matrix}\right|
\left.\begin{matrix}
1 & 6 \\
4 & 6 \\
4.5 & ... &\\
6 & ... &\\
\end{matrix}\right| $$
Ahora comprobamos con octave, utilizando roots y rlocus

Las raíces se encuentan en los puntos (-2.57474, 0i), (-0.71263, 1.35i) y (-0.71263, -1.35i) como las raíces son negativas, el sistema es estable.
c) s3 + 2s2 - 4s + 20
Para éste sistema la tabla queda resuelta de la siguiente forma:
$$\left.\begin{matrix}
s^{3}\\
s^{2}\\
s^{1}\\
s^{0}\\
\end{matrix}\right|
\left.\begin{matrix}
1 & -4 \\
2 & 20 \\
-14 & ... &\\
20 & ... &\\
\end{matrix}\right| $$
Como podemos notar, en ésta tabla hay 2 cambios de signo, en la tercera y cuarta fila, ésto quiere decir que existen 2 raíces positivas, eso lo comprobamos con octave, utilizando roots y rlocus

Las raíces se encuentan en los puntos (-4.1361, 0i), (1.0681, 1.9221i) y (1.0681, -1.9221i) , existen 2 raíces positivas por lo que el sistema es inestable
d) s4 + s3 + 2s2 + 10s + 8
Para éste sistema la tabla queda resuelta asi:
$$\left.\begin{matrix}
s^{4}\\
s^{3}\\
s^{2}\\
s^{1}\\
s^{0}\\
\end{matrix}\right|
\left.\begin{matrix}
1 & 2 & 8\\
1 & 10 & ...\\
-8 & 8 & ...\\
11 & ... & ...\\
8 & ... & ...\\
\end{matrix}\right| $$
Como podemos notar, en ésta tabla hay 2 cambios de signo, en la tercera y cuarta fila, ésto quiere decir que existen 2 raíces positivas, eso lo comprobamos con octave, utilizando roots y rlocus

Las raíces se encuentan en los puntos (0.83512, 2.02294i), (0.83512, -2.02294i), (-1.67024, 0i) y (-1.0, 0i), existen 2 raíces positivas por lo que el sistema es inestable
e) s4 + s3 + 3s2 + 2s + K
Para éste sistema la tabla queda resuelta asi:
$$\left.\begin{matrix}
s^{4}\\
s^{3}\\
s^{2}\\
s^{1}\\
s^{0}\\
\end{matrix}\right|
\left.\begin{matrix}
1 & 3 & K\\
1 & 2 & ...\\
1 & K & ...\\
2-K & ... & ...\\
K & ... & ...\\
\end{matrix}\right| $$
Además de resolver la tabla será necesario hallar K y el intervalo donde K hace del sistema un sistema estable, en éste caso, su valor se encuentra despejando la variable.
$$ 2 - K = 0 \\
K = 2$$
Entonces, el intervalo que hace que el sistema sea estable es 0 < K < 2.
En ésta tabla no hay cambios de signo, en la tercera y cuarta fila eso lo comprobamos con octave, utilizando roots y rlocus. Le asignamos a K valores dentro y fuera del intervalo, estos son los resultados:
| Valor de K | Raíces | Conclusión | Imágen |
|---|---|---|---|
| K = 0 | -0.14239 + 1.66615i -0.14239 - 1.66615i -0.71523 + 0.00000i 0.00000 + 0.00000i | Marginalmente estable (raíz en 0) |  |
| K = 1 | -0.10488 + 1.55249i -0.10488 - 1.55249i -0.39512 + 0.50684i -0.39512 - 0.50684i | Sistema Estable |  |
| K = 2 | -0.00000 + 1.41421i -0.00000 - 1.41421i -0.50000 + 0.86603i -0.50000 - 0.86603i | Sistema Estable | 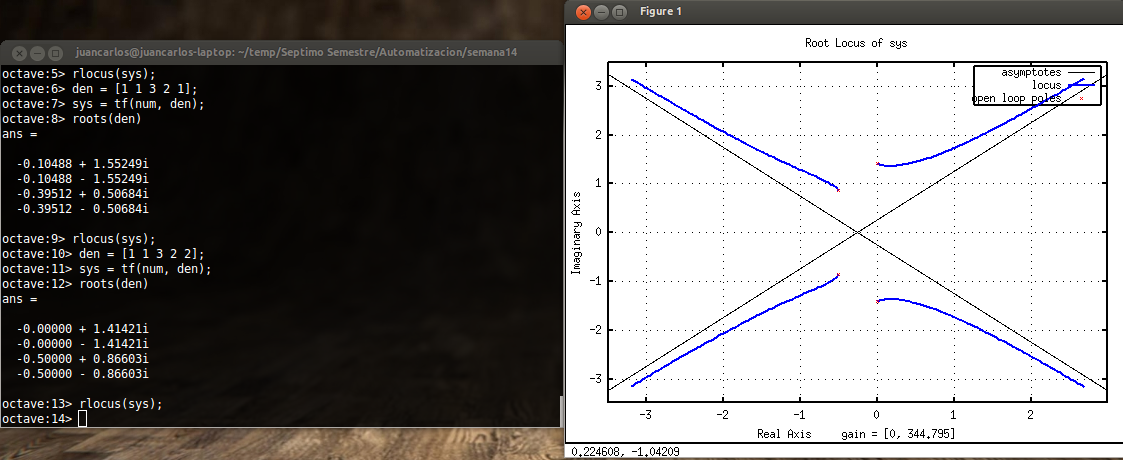 |
| K = -1 | -0.16109 + 1.75438i -0.16109 - 1.75438i -1.00000 + 0.00000i 0.32219 + 0.00000i | Sistema Inestable | 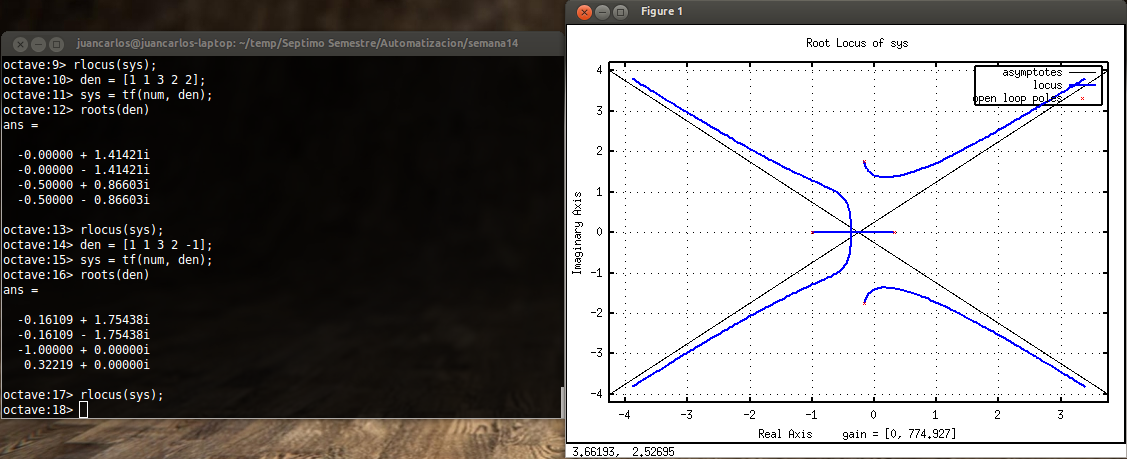 |
| K = 3 | 0.1765 + 1.3641i 0.1765 - 1.3641i -0.6765 + 1.0621i -0.6765 - 1.0621i | Sistema Inestable |  |
Con esta sencilla prueba podemos ver como el sistema se comporta de forma estable cuando los valores de K se encuentran dentro del intervalo 0 < K < 2.
f) s5 + s4 + 2s3 + s + 5
Es éste problema la tabla de criterio de routh queda:
$$\left.\begin{matrix}
s^{5}\\
s^{4}\\
s^{3}\\
s^{2}\\
s^{1}\\
s^{0}\\
\end{matrix}\right|
\left.\begin{matrix}
1 & 2 & 1\\
1 & 0 & 5\\
2 & -4 & ...\\
2 & 5 & ...\\
-9 & 0 & ...\\
5 & 0 & ...\\
\end{matrix}\right| $$
s^{5}\\
s^{4}\\
s^{3}\\
s^{2}\\
s^{1}\\
s^{0}\\
\end{matrix}\right|
\left.\begin{matrix}
1 & 2 & 1\\
1 & 0 & 5\\
2 & -4 & ...\\
2 & 5 & ...\\
-9 & 0 & ...\\
5 & 0 & ...\\
\end{matrix}\right| $$
Como podemos notar, en ésta tabla hay 2 cambios de signo, en la quinta y sexta fila, ésto quiere decir que existen 2 raíces positivas, eso lo comprobamos con octave, utilizando roots y rlocus

Las raíces se encuentan en los puntos (-0.68376, 1.57543i), (-0.68376, -1.57543i), (-1.19456, 0i), (0.78104, 0.89948i) y (0.78104, -0.89948i), existen 2 raíces positivas por lo que el sistema es inestable
g) s5 + s4 + 2s3 + s2 + s + K
Es éste problema la tabla de criterio de routh queda:
$$\left.\begin{matrix}
s^{5}\\
s^{4}\\
s^{3}\\
s^{2}\\
s^{1}\\
s^{0}\\
\end{matrix}\right|
\left.\begin{matrix}
1 & 2 & 1 \\
1 & 1 & K \\
1 & 1-K & ...\\
1-(1-K) & K & ...\\
(1-(1-K))(1-K) & ... & ...\\
((1-(1-K))(1-K))(k) & ... & ...\\
\end{matrix}\right|$$
La tabla nos queda algo extraña, sin embargo, es posible reducirla si vamos resolviendo las ecuaciones poco a poco y asi obtener una tabla más clara.
Podemos despejar K en la ecuación de la fila s2 tal que:
$$1-(1-K) = 0\\ 1 = 1-K \\ K = 1-1 \\ K = 0$$
Ahora, si
$$1-(1-K) = 0\\
K = 0 \\
\therefore \\
1-(1-K) = K$$
Lo que resulta en la siguiente tabla
$$\left.\begin{matrix}
s^{5}\\
s^{4}\\
s^{3}\\
s^{2}\\
s^{1}\\
s^{0}\\
\end{matrix}\right|
\left.\begin{matrix}
1 & 2 & 1 \\
1 & 1 & K \\
1 & 1-K & ...\\
K & K & ...\\
-K^{2} & ... & ...\\
-K^{3} & ... & ...\\
\end{matrix}\right|$$
Sin embargo, K da signos de ser 0, lo que quiere decir que no existe un margen que permita que el sistema sea estable, concluímos desde ahora que el sistema es marginalmente estable porque tiene raíz en 0 cuando K = 0.
Comprobamos con OCTAVE:
| Valor de K | Raíces | Conclusión | Imágen |
|---|---|---|---|
| K = 0 | -0.50000 + 0.86603i -0.50000 - 0.86603i 0.00000 + 1.00000i 0.00000 - 1.00000i 0.00000 + 0.00000i | Marginalmente estable |  |
| K = 1 | -0.45570 + 1.20015i -0.45570 - 1.20015i -0.76683 + 0.00000i 0.33911 + 0.82238i 0.33911 - 0.82238i | Sistema Inestable |  |
| K = -1 | -0.79944 + 0.85066i -0.79944 - 0.85066i 0.06070 + 1.23821i 0.06070 - 1.23821i 0.47748 + 0.00000i | Sistema Inestable |  |
Concluye la actividad
Referencias
N/A























